ARMADO DE PROYECTO PATILLERO INTELIGENTE
1. COMPETENCIA ESPECIFICA DE LA SESIÓN:
2.1¿Qué es Arduino?


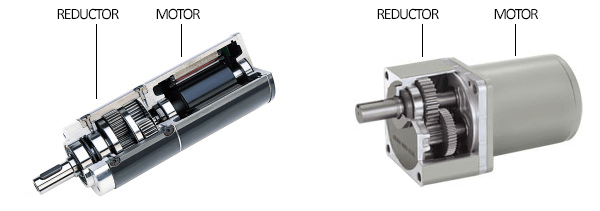
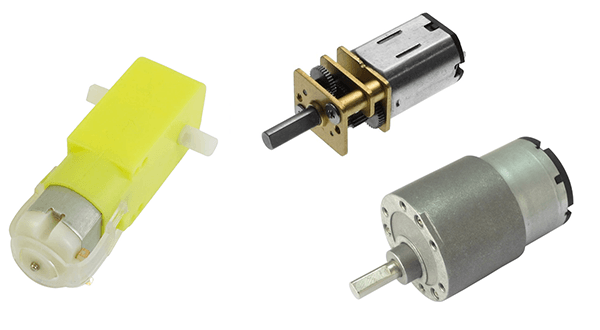
Un motor tipo Gorila es un motor de corriente continua que incorpora un reductor interno. Esto aumenta el par del motor y reduce su velocidad. Velocidades de giro habituales son 60, 120, 240 y 480 rpm, entre otras.
 3. EVIDENCIA DE TAREAS DEL LABORATORIO
3. EVIDENCIA DE TAREAS DEL LABORATORIO



4. OBSERVACIONES
-Al realizar las conexiones en nuestro protoboard verificar los componentes que esten en buen estado, de lo contrario habrá fallas en nuestro circuito.
-Al realizar el armado del pastillero tener en cuenta que encajen todas las piezas de tal forma que funcione correctamente.
-Verificar en el puerto este conectado y también configurar según el arduino que estemos usando para que logre subir.
-Antes de subir el programa debemos de compilar primero para detectar posible errores en el programa.
5.CONCLUSIONES
-Se logró realizar el funcionamiento en físico, cargando el programa propuesto en Cursera, aprendiendo nuevas funciones de programación.
-Se completo el reto propuesto en clase por el profesor, demostrando la habilidad de programación y el aprendizaje obtenido.
-En síntesis se demostró lo aprendido durante el curso Arduino, teniendo en cuenta su infinidad de aplicaciones desde pequeñas cosas hasta programar grandes sistemas.
- Realizar de la integración del segundo proyecto pastillero inteligente.
- Mostrar el funcionamiento de la integración de las variables de nuestro pastillero de forma física mediante una maqueta.
- Comprender y explicar la programación de la integración de variables entendiendo cada una de las funciones nuevas a utilizar.
2.1¿Qué es Arduino?
Arduino es una plataforma de creación de electrónica de código abierto, la cual está basada en hardware y software libre, flexible y fácil de utilizar para los creadores y desarrolladores. Esta plataforma permite crear diferentes tipos de microordenadores de una sola placa a los que la comunidad de creadores puede darles diferentes tipos de uso.
Para poder entender este concepto, primero vas a tener que entender los conceptos de hardware libre y el software libre. El hardware libre son los dispositivos cuyas especificaciones y diagramas son de acceso público, de manera que cualquiera puede replicarlos. Esto quiere decir que Arduino ofrece las bases para que cualquier otra persona o empresa pueda crear sus propias placas, pudiendo ser diferentes entre ellas pero igualmente funcionales al partir de la misma base.
El software libre son los programas informáticos cuyo código es accesible por cualquiera para que quien quiera pueda utilizarlo y modificarlo. Arduino ofrece la plataforma Arduino IDE (Entorno de Desarrollo Integrado), que es un entorno de programación con el que cualquiera puede crear aplicaciones para las placas Arduino, de manera que se les puede dar todo tipo de utilidades.
2.1.1 ¿Cómo funciona?
El Arduino es una placa basada en un microcontrolador ATMEL. Los microcontroladores son circuitos integrados en los que se pueden grabar instrucciones, las cuales las escribes con el lenguaje de programación que puedes utilizar en el entorno Arduino IDE. Estas instrucciones permiten crear programas que interactúan con los circuitos de la placa.
El microcontrolador de Arduino posee lo que se llama una interfaz de entrada, que es una conexión en la que podemos conectar en la placa diferentes tipos de periféricos. La información de estos periféricos que conectes se trasladará al microcontrolador, el cual se encargará de procesar los datos que le lleguen a través de ellos.
El tipo de periféricos que puedas utilizar para enviar datos al microcontrolador depende en gran medida de qué uso le estés pensando dar. Pueden ser cámaras para obtener imágenes, teclados para introducir datos, o diferentes tipos de sensores.
También cuenta con una interfaz de salida, que es la que se encarga de llevar la información que se ha procesado en el Arduino a otros periféricos. Estos periféricos pueden ser pantallas o altavoces en los que reproducir los datos procesados, pero también pueden ser otras placas o controladores.
2.2 Motor tipo Gorila
Es frecuente que strong>algunos motores tipo gorila incorporan un encoder interno. Este encoder suele estar aplicado en el lado de alta velocidad, por lo que la precisión es superior a añadir una encoder acoplado al eje.
Los motores tipo gorila son frecuentes para accionar ruedas de robots y vehículos.
2.3 Puente H L293D
El Driver L293D es un Puente H que facilita el control de motores con Arduino o Pic. Posee diodos internos de protección para cargas inductivas como motores. Su pequeño tamaño es ideal para ser utilizado en proyectos de robótica móvil como seguidores de línea, velocistas, laberinto. Permite controlar la dirección de giro y la velocidad de cada motor de forma independiente.
Soporta:
- 2 Motores DC bidireccionales
- 1 Motores Paso a Paso (unipolares o bipolares)
- Separación entre Fuente de motor/fuente del Arduino
Datasheet
3.1 Diseño, corte y armado de nuestro pastillero inteligente



3.2 Video
Laboratorio N°7
4. OBSERVACIONES
-Al realizar las conexiones en nuestro protoboard verificar los componentes que esten en buen estado, de lo contrario habrá fallas en nuestro circuito.
-Al realizar el armado del pastillero tener en cuenta que encajen todas las piezas de tal forma que funcione correctamente.
-Verificar en el puerto este conectado y también configurar según el arduino que estemos usando para que logre subir.
-Antes de subir el programa debemos de compilar primero para detectar posible errores en el programa.
5.CONCLUSIONES
-Se logró realizar el funcionamiento en físico, cargando el programa propuesto en Cursera, aprendiendo nuevas funciones de programación.
-Se completo el reto propuesto en clase por el profesor, demostrando la habilidad de programación y el aprendizaje obtenido.
-En síntesis se demostró lo aprendido durante el curso Arduino, teniendo en cuenta su infinidad de aplicaciones desde pequeñas cosas hasta programar grandes sistemas.